- 日本語
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolskiSuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
連絡先からホール効果:あらゆる種類の位置センサーの探索
カタログ

位置センサーの種類
位置センサーは、オブジェクトの空間位置を検出し、この情報を実用的な出力信号に変換するために設計されたデバイスです。このようなセンサーは、現代生活の複雑さに織り込まれており、しばしば気付かれないが鋭く感じられます。それらは主に2つのフレーバーに存在します:
- 連絡先タイプ:この品種には、オブジェクトとの直接的な相互作用が必要です。これは、穏やかな手が愛する人の鼓動を感じる方法に似ています。
- 近接タイプ:対照的に、近接センサーは孤独なままであり、タッチを必要とせずに部屋で暖かい存在感を感じるようなオブジェクトの近さを感じます。
接触位置センサー

操作の原則
2つのエンティティが接触し、互いに押し付けられると、接触位置センサーの接触端子が反応します。この感覚相互作用は、オブジェクトの物理的収束に根ざしており、具体的な活動を示します。
センサーの種類
旅行スイッチ
信頼性と手頃な価格を念頭に置いて構築されたトラベルスイッチは、接触時にアクティブになり、制御コマンドが効果的です。機械加工センターのx、y、z軸の末端で旅行スイッチを使用すると、移動境界を正確に定義できます。
二次元マトリックス位置センサー
ロボットの手のひらに埋め込まれた2次元マトリックス位置センサーは、ロボットと外部オブジェクトの間の正確な接触点を識別し、物理的な世界との複雑な通信を可能にします。
近接位置センサー

定義と機能
多くの場合、近接スイッチと呼ばれる近接位置センサーは、指定された範囲内のオブジェクトの存在を検出し、物理的な接触を必要とせずにアプローチを通知します。この機能は、テクノロジーと環境の間の微妙なダンスを具体化し、動きを微妙な期待の芸術として感知します。
近接スイッチの種類
- 電磁
- 光電
- 微分変圧器
- 渦電流
- 容量性
- リードスイッチ
- ホールタイプ
近接スイッチの各タイプは、特定の産業シナリオに応えるさまざまな革新的な原則とメカニズムを反映して、独自の機能を誇っています。
CNC工作機械のアプリケーション
近接位置センサーは、特にCNC工作機械で多様なアプリケーションを見つけ、次のような機能を強化します。
- ツール選択制御
- テーブルトラベルコントロール
- シリンダー旅行管理
- ピストンムーブメントの監視
それらの貢献は、これらのプロセス内で深く共鳴し、精度を支配するマシンの直感的な要求に合わせて、効率と精度の両方を調和させます。
ブラシレスDCモーター
ブラシレスDCモーターのコンポーネント
位置センサーは、ブラシレスDCモーターシステムに不可欠です。このコンポーネントは、移動中のメインローターの位置を識別するため、ブラシDCモーターとは一線を画します。ローター磁極の位置信号を電気信号に変換し、それらの伝導とカットオフを制御する際にロジックスイッチ回路を支援します。巻線の電流がローターの位置の変化と整然と逆転することを保証することにより、エアギャップ内の踏み込み磁場が形成され、永続的な磁石ローターが連続的に回転するように推進します。
位置センサーの役割
位置センサーは、ローターの位置を測定するために極めて重要です。モーターコントローラーは、インバーターを位置センサー信号を使用してローターと同期させ、連続モーターの動作を可能にします。位置センサーなしでモーターの起動時に、ステーター巻線の誘導電気電力力を介してローターの位置を検出することは可能ですが、最小速度は検出不能な電気力信号に変換されます。
ホールセンサーチップの種類
DCブラシレスモーターの位置センサーとして適したホールセンサーチップには、2つのタイプがあります。
- スイッチタイプ
- ロックタイプ
電気自転車への適用
両方のホールセンサーチップタイプは、電動自転車モーターにおけるローターマグネットの位置を正確に測定できます。これらのホールセンサーチップを使用しているにもかかわらず、DCブラシレスモーターは、同じモーターコントローラーとシームレスに調和する出力、効率、およびトルクの点で同じパフォーマンスを示します。
モーターの動作への影響
位置センサーは、モーターの動作ノイズを減らし、モーターの寿命と性能を向上させながら、同時にエネルギー消費を削減することで大きく貢献します。この改善は、運動市場の拡大のための堅牢な触媒として機能します。
クランクシャフトとカムシャフトの位置の光電気センサー
詳細なアーキテクチャ
光電気クランクシャフトとカムシャフト位置センサーは、信号パネル、信号発電機、ディストリビューター、住宅、ハーネスプラグなど、いくつかの主要なコンポーネントで構成されています。これらの要素は、センサーの機能に異なる役割を果たします。
信号ローターと呼ばれることもある信号パネルは、センサーシャフトにしっかりと取り付けられています。その端近く、透明な穴の同心円を特徴とし、間隔アークパターンで正確に配置されています。外側の円は360の透明なスリットを誇り、それぞれ1°間隔を作成します(透明穴とブロッキング穴はそれぞれ0.5°です)。それらの役割は、クランクシャフトの角度と速度シグナルを生成することです。

対照的に、内側の円は、各シリンダーのトップデッドセンター信号を生成することに特化した6つの透明な穴で構成されています。これらは60°の間隔で間隔を空けていますが、1つの穴は幅が長く際立っており、シリンダー1°の上位中心を示しています。
シームレスな機能を確保するために、信号ジェネレーターがセンサーハウジングに取り付けられています。これには、信号処理回路に沿ったNEおよびG信号ジェネレーターが含まれます。これらのジェネレーターは、スピードとトップデッドセンターシグナルを担当し、LEDとフォトトランジスタ(またはフォトダイオード)ペアに依存して、互いに直接向きます。
運用原則
図に示されているように、光電センサーの動作原理は、LEDとPhotoTransistorの間の相互作用にかかっています。信号パネルが回転すると、その透明な穴が定期的にそれらの間で整列します。LEDによって放出された光は、フォトトランジスタに該当し、それによってそれをオンにして、低レベルの出力(0.1-0.3V)になります。
逆に、信号パネルのブロッキングセグメントがLEDとPhotoTransistorの間で交差する場合、光はPhotoTransistorに到達しません。オフになり、コレクターが高レベルの信号(4.8-5.2V)を放出します。
信号パネルの連続回転により、透明性とブロッキングホールがLEDとフォトトランジスタを交互に行い、高レベルと低レベルの信号を交互に生成します。センサーシャフトがクランクシャフトとバルブカムシャフトで回転すると、LEDの光はフォトトランジスタに焦点を合わせて、クランクシャフトとカムシャフトの両方の正確な位置に関連するパルス信号を作成します。
クランクシャフトの2つの回転がセンサーシャフトの1回の回転を促していることを考えると、G信号センサーは6個のパルス信号を蓄積し、NE信号センサーは360個のパルスを蓄積します。G信号透明穴の間に60°のギャップがあるため、各120°のクランクシャフトターンはパルスを栽培するため、しばしば120°信号と呼ばれるG信号です。この信号は、燃料噴射と点火タイミングをタイムリーにECU制御するために、70°BTDC(トップデッドセンターの前)を設計する必要があります。
さらに、NEホールの1°間隔(各透明穴とブロッキングホールがそれぞれ0.5°)で、各パルスサイクル内で、高位レベルが1°クランクシャフトの回転を超えて分布します。したがって、360の信号は720°クランクシャフトの回転を示しています。120°回転するたびに、Gセンサーは1回、NEセンサーは60回信号を送ります。
クランクシャフトとカムシャフトの磁気誘導位置検出
磁気位置センサーの動作原理
磁気位置センサーの動作原理を図に示します。磁力線は特定の領域を移動します。

- 永久磁石のn極から
- ステートル間のエアギャップを越えて
- ローターの隆起した歯を通して
- これらの隆起した歯とステーターの磁気ヘッドとの間のエアギャップを通して
- 磁気頭を通過します
- フラックス濃縮プレートに到達します
- 永久磁石のn極に戻ります
ローター機能と誘導電気力
信号ローターが回転すると、磁気回路のエアギャップは定期的に変化し、信号コイルヘッド内の磁気抵抗と磁束の両方に影響します。電磁誘導原理に沿ったこの周期的な変化は、センシングコイルの交互の電気的な力の生成をもたらします。
ローターの時計回りの回転中、ローターの上昇した歯と磁気頭の間のエアギャップの減少は、回路の磁気抵抗の減少と磁束の増加と相関します。φの変化速度が上昇すると(dφ/dt> 0)、誘導された電気的な力Eは、図の曲線ABCで示されているように、陽性(e> 0)に変わります。隆起した歯が磁気頭の端に近づくと、磁束φの迅速な上昇とその変化速度が高まり、図の点Bで見られるEMAXでEがピークになります。過去のポイントBを進めると、φの継続的な増加にもかかわらず、磁束の変化の先細りの速度につながり、誘導電気力Eが減少します。

ローターの上昇した歯が磁気ヘッドの中心線と整合する接合部では、最小化されたエアギャップにより、磁気抵抗が最も低く、最大の磁束を保証します。これらの強化にもかかわらず、磁束は上昇しなくなります。その結果、磁束の変化速度がゼロであるため、誘導された電気的な力Eはゼロに落ち着き、図CのポイントCで表されます。
ローターのさらに時計回りの動きにより、上昇した歯が磁気頭から出発し、エアギャップが拡大し、磁気抵抗が高まり、磁束φ(dφ/dt」が減少します。<0), and inducing a negative electromotive force E, consistent with curve cda in Figure. Upon completely departing from the edge of the magnetic head, φ's swift downturn hits its lowest point [dφ/dt=-(dφ/dt)max], asserting E's negative peak as -Emax, illustrated at point d on the curve in Figure.
磁気位置センシングの利点
上昇した歯を通るローターを回転させるたびに、センシングコイルに周期的な交互の電気的電気力が生成され、交互の電圧信号として現れる最大値と最小値が頂点に達します。
磁気位置センシングの顕著な贅沢の1つは、外部電源の排除です。永久磁石は、磁気エネルギーを減らすことなく、機械エネルギーを電気エネルギーに効率的に変換します。エンジン速度が変動すると、ローターの上昇した歯の速度シフトが変化し、コア内の磁束変化率が変化します。回転速度の増加は、磁束速度の変化を拡大し、センシングコイル内の誘導電気的な力を高め、これらの変動は図に示されています。
ローターの歯と磁気頭の間のエアギャップが磁気回路の抵抗とセンシングコイルの出力電圧を大幅に揺さぶることを考えると、エアギャップの変更には注意が不可欠です。調整は、通常0.2〜0.4mmの間に設定された指定された規制に準拠する必要があります。
車の磁気誘導クランクシャフト位置センサー
構造的特徴
自動車用の磁気誘導クランクシャフト位置センサーは、クランクケースのクラッチに隣接するシリンダーに戦略的に配置されます。このデバイスは、本質的に信号ローターとペアになった信号ジェネレーターで構成されています。

ネジ付きのエンジンシリンダーブロックにしっかりと取り付けられた信号ジェネレーターには、永久磁石、センシングコイル、ハーネスコネクタが含まれています。センシングコイルは、その機能の心臓に似ており、信号コイルと呼ばれ、クランクシャフトに貼られた信号ローターに面しています。直接反対側に磁気ヘッドが整列すると、永久磁石は磁気ヨークを介してリンクされ、磁気経路を鍛造します。
信号ローターは歯付きディスクで、58個の隆起した歯でマークされています。これらは57の小さなギャップで区切られ、1つの顕著な大きなギャップがあります。この大きなギャップは、シリンダー1またはシリンダー4のいずれかが圧縮トップデッド中心に到達する前に正確な角度を信号する参照信号を提供するのに役立ちます。したがって、このローターの円周の歯と隙間の角度の構成は360°です。
運用ダイナミクス
位置センサーは、クランクシャフトの回転と連携して移動します。信号ローターが各凸歯を通過すると、センシングコイルが寿命に巻き込まれ、関連する交互の電圧信号を放出するリズミカルな交互の電気的な力が生成されます。
かなりの歯の隙間を備えた信号ローターの特別な設計により、磁気頭を通過するこのギャップの通過中に基準信号が現れ、より広いパルス信号が生じます。この信号は、シリンダー1または4のいずれかのトップデッド中心に先行する明確な角度と整列し、センサーに極めて重要なモーメントを伝えます。
電子制御ユニット(ECU)がこの拡張されたパルスを検出すると、カムシャフトの位置センサーからの入力に基づいて、シリンダー1または4の差し迫ったトップデッド中心を測定するため、予測が構築されます。信号ローターが回転するたびに、SENSING COILはECUに58の交互の電圧信号を派遣し、エンジンクランクシャフトの完全な革命を反映しています。
クランクシャフトを使用した信号ローターの完全な回転ごとに、センシングコイルは58パルス信号をECUに供給します。ECUがこれらを収集すると、エンジンクランクシャフトの完全な回転ごとに認識されます。たとえば、ECUが1分以内に116000の信号を登録すると、1分あたり2000回転としてクランクシャフト速度を計算します(n = 116000/58 = 2000)。同様に、1分あたりの信号周波数を評価することにより、ECUはエンジンクランクシャフトの回転速度を推測します。
エンジンの速度と荷重信号は、電子制御システム内の必須の制御入力として機能します。これらの信号は、ECUの基礎を築き、3つの主要な制御パラメーターを計算します。基本的な注入前角、基本的な点火前角、および点火伝導角です。
ホールタイプのクランクシャフトとカムシャフト位置センサー
構造と機能を理解する

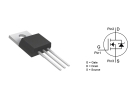
ホールタイプのクランクシャフトとカムシャフトの位置センサー、および他のホールセンサーは、ホール効果から動作を導き出し、ホール効果の位置センサーのカテゴリ内に配置します。
アメリカの物理学者Dr. E.H.によって発見ジョンズホプキンス大学のホール1879年、ホール効果は興味深い現象を明らかにしています。電流Iが誘導Bのフィールドに磁気線に垂直に配置される長方形のプラチナ導体が、磁場と電流の両方に垂直な電圧が導体側に現れます。現在のIと誘導Bに直接比例するこのホール電圧は、磁場の消失で即座に消滅します。
ホールエフェクトフォーマーラ

-KH:ホール係数
-D:プラチナ導体の厚さ
ホール効果で作られたコンポーネントはホール要素として知られており、これらの要素を組み込んだセンサーはホールセンサーです。これらのセンサーは、磁場の状態との電圧変化を示すだけでなく、磁場強度と電流の間の相関に基づいてワイヤを介して電流を測定することもできます。
1980年代以来、自動車は主に魅力的な特徴のために、ホールセンサーにますます依存しています。
- 出力電圧信号は平方波に似ています。
- オブジェクトの速度は回転速度に依存しません。
磁気誘導センサーとは異なり、ホールセンサーは通常、外部電源が必要です。
ホールセンサーの重要なコンポーネント
ホールセンサーは、トリガーインペラー、ホール統合回路(IC)、磁気ヨーク、および永久磁石で構成されています。トリガーインペラーは、ローターシャフトに貼られており、カウントとエンジンシリンダーが同一のブレードを備えています。インペラーがローターシャフトに沿って回転すると、その刃はホールICと永久磁石の間のギャップを通過します。ホールICには、ホール要素、増幅回路、電圧安定化回路、温度補償回路、信号変換回路、および出力回路が含まれます。
ホールセンサーの運用力学
センサーシャフトの回転は、ホールICと磁石の間のエアギャップを通してインペラーブレードを駆動します。エアギャップを出ると、磁石のフラックスがホールICをループし、ホール要素が電圧を生成するように促します(UH = 1.9-2.0V)。その結果、ホールICの出力トランジスタがアクティブになり、UCCが14.4Vまたは5Vの場合、センサー信号電圧U0(0.1-0.3V)が低くなります。
ブレードがエアギャップに入ると、ホールICの磁場を迂回させます。ホール電圧UHはゼロに低下し、ICの出力トランジスタを非アクティブにし、センサー信号電圧U0(UCC = 14.4V; 4.8Vで9.8V; UCC = 5Vで4.8V)を上げます。
ホールタイプのカムシャフト位置センサーのアーキテクチャ

エンジンインテークカムシャフトの端に位置するホールタイプのカムシャフト位置センサーは、ホール信号ジェネレーターと信号ローターを統合します。吸気カムシャフト、信号ローター、またはトリガーインペラーのポジショニングボルトとベゼルが貼り付けられており、ブレードとして機能する窓の中隔が特徴です。ウィンドウは、低レベルの信号と相関しています。中隔は、高レベルの信号に関連しています。
ホールIC、永久磁石、および磁気鋼板で構成されたホールタイプの信号発電機は、ホール要素のシリコン半導体材料を悪用し、磁石から0.2-0.4mmのギャップを維持します。回転が発生すると、中隔と窓はホールICと磁石の間のギャップを交差させます。
センサーの接続ソケットには3つの端子があります。
-ECU端末への端子1(正)リンク62。
- 信号出力の端子2は、ECU端子76に接続します。
-ECU端子67を使用した端子3(負)インターフェイス。
運用コンテキスト

ホールセンサーの原則に従って機能すると、センサーはエアギャップのブレードを使用して高レベル(5V)信号を出力します。出発ブレードは、低レベル(0.1V)信号を誘導します。
図に示すように、CAMおよびCRANKの位置センサーの信号電圧関係は、2つのクランクシャフトターン(720°)ごとに1ターン(360°)を完了し、高レベルの信号と低レベルの信号を生成するホールセンサー信号ローターを完了することを伴います。低レベルの信号は、シリンダー1の圧縮トップデッドセンターの前で角度と並んでいます。
エンジンの動作中、磁気誘導CPSおよびホールCIからの信号電圧は、常にECUに到達します。低レベル(15°)のクランクシャフト位置とカムシャフトウィンドウ信号のオーバーラップは、Cylinder 1の圧縮とシリンダー4の排気ストロークのECUに通知します。
さらに、イグニッションアドバンスアングルは、クランクケースの歯の隙間からの信号に基づいて調整されます。Cylinder 1の圧縮後のトップデッドセンター認識では、ECUはシーケンシャルシリンダー燃料噴射と点火タイミングを制御します。
ECUによる表示検出は、表示センサーからの信号を介して通知され、影響を受けたシリンダーの識別と爆発に対抗するための前進角削減を可能にします。
ディファレンシャルホールタイプクランクシャフト位置センサー
微分ホールセンサーとして知られるデバイスは、時にはデュアルホールセンサーと呼ばれ、図に示すように磁気誘導センサーに似ています。ホール信号ジェネレーターと一緒に歯を上げた信号ローターを備えています。
構造とコンポーネント
信号ローターは、顕著な歯で作られており、ホール信号ジェネレーターと協調して機能します。これらの2つのコンポーネントは、センサーの基礎構造を形成します。
動作の原則と機能
ディファレンシャルホールセンサーの機能は、従来のホールセンサーの機能を反映しています。エンジンフライホイールのノッチと上げた歯がホールシステムのデュアルプローブを通り過ぎると、歯とプローブの中でエアギャップでバリエーションが発生します。その結果、これらの変化は磁束を変えます。

ホールの要素では、図に描かれた交互の電圧信号が現れます。電圧出力は、2つの異なるホール信号電圧のオーバーレイで構成されています。この二重電圧相互作用により、信号発生器と上昇した歯の間のエアギャップが1±0.5mmに拡大することができます。これは、標準のホールセンサーで見つかった典型的な0.2-0.4mmギャップよりも顕著な改善です。これは、信号ローターが磁気誘導センサーのローターに似た歯付きディスク構成を採用し、簡単な設置を促進できることを意味します。
自動車システムのアプリケーション
自動車のコンテキスト内で、上昇した歯ローターは通常、エンジンクランクシャフトまたはフライホイールにその配置を見つけ、システムのパフォーマンスを向上させます。
よくある質問[FAQ]
1。位置センサーはどれですか?
位置センサーは、ボディがその基準点から覆う距離を測定するためのツールとして機能します。固定点または任意の参照フレームに関連して、線形または角度の位置を評価します。これらのセンサーは、オブジェクトが存在するか存在しないかを検出することもできます。
2。位置センサーはどのように機能しますか?
光学位置センサーは、2つのコア原理に基づいて機能します。まず、エミッタからセンサーの反対側に配置されたレシーバーに光の伝送。第二に、監視対象のオブジェクトから放出された光の反射が監視され、光源に向かって戻ります。
3.どのタイプの材料を渦電流位置センサーで検出できますか?
渦電流変位センサーは、検出プロセス中に高周波磁場を活用することにより、金属オブジェクトを識別することに熟達しています。
4.ポテンショメータ位置センサーとは何ですか?
ポテンショメータセンサーは、線形または回転運動のオブジェクトの距離または変位を評価し、その後、これらの測定値を電気信号に変換します。
5。線形位置センサーとは何ですか?
線形位置センサーは、オブジェクトまたは機械と統合して線形変位を電気信号に変換し、オブジェクトの比例変位を反映しています。
関連ブログ
-
Op-amp回路の基礎
![Op-amp回路の基礎]()
12/28/2023
エレクトロニクスの複雑な世界では、そのミステリーへの旅は、常に絶妙で複雑な回路コンポーネントの万華鏡に私たちを導きます。このレルムスタンドの操作アンプ... -
100万、10億、兆に何ゼロ?
![100万、10億、兆に何ゼロ?]()
07/29/2024
百万は10を表します6、日常のアイテムや年間給与と比較した場合、簡単に把握できる人物。 10億、10に相当9、大規模な金融取引や国家GDPを網羅し、人間の想像力を... -
SCRへの包括的なガイド(シリコン制御整流器)
![SCRへの包括的なガイド(シリコン制御整流器)]()
04/22/2024
シリコン制御整流器(SCR)、またはサイリスタは、パフォーマンスと信頼性のために、パワーエレクトロニクステクノロジーで極めて重要な役割を果たします。この... -
CR2032リチウムイオンバッテリー:マルチシナリオアプリケーションとそのユニークな利点
![CR2032リチウムイオンバッテリー:マルチシナリオアプリケーションとそのユニークな利点]()
01/25/2024
一般的に使用されるコイン型のリチウムイオンバッテリーであるCR2032バッテリーは、直径20 mm、厚さ3.1 mmのデジタル時計やポケットライトなどの多くの低電力電... -
BC547トランジスタ包括的ガイド
![BC547トランジスタ包括的ガイド]()
07/4/2024
BC547トランジスタは、基本的な信号アンプから複雑な発振器回路や電力管理システムに至るまで、さまざまな電子アプリケーションで一般的に使用されています。優... -
サーミスタとは何ですか
![サーミスタとは何ですか]()
12/28/2023
現代の電子技術の領域では、サーミスタの性質と作業メカニズムを掘り下げることが重要な努力になります。これらの精度で高度に適応性のある電子コンポーネントは... -
NPNおよびPNPトランジスタ
![NPNおよびPNPトランジスタ]()
12/28/2023
現代の電子技術の世界を探求するために、トランジスタの基本原則と応用を理解することが不可欠です。NPNタイプとPNPトランジスタは機能が類似しているように見え... -
PCBとPCBAの違いを調べます
![PCBとPCBAの違いを調べます]()
04/16/2024
PCBは、電子デバイスのバックボーンとして機能します。非導電性材料で作られているため、成分を物理的にサポートしながら、エッチングされた銅経路を介して電気... -
IRLZ44N MOSFETデータシート、回路、同等のピンアウト
![IRLZ44N MOSFETデータシート、回路、同等のピンアウト]()
08/28/2024
IRLZ44Nは、広く使用されているNチャネルパワーMOSFETです。優れたスイッチング機能で有名であるため、特に電子機器と電圧レギュレーションでは、多数のアプリケ... -
ソレノイドスイッチとは何ですか
![ソレノイドスイッチとは何ですか]()
12/26/2023
電流がコイルを流れると、結果として得られる磁場が鉄のコアを引き付けたり反発したりして、動き、回路を開閉します。この基本的な作業原則により、電磁スイッチ...





ホット製品
- DS80C320-ECG
- MT49H8M36SJ-25:B
- MC10H350FNR2
- LMV431BIMF/NOPB
- LT1167AIS8
- TLC372CDR
- 08053C471K4T2A
- IRF7820TRPBF
- T491D106M025AS
- CGA3E3X7R1H224K080AD
- M24C02-RDW6TP
- T494X336K025AT
- S9S12G240VLF
- XC5VLX155T-1FF1738C
- LM4836MTX/NOPB
- RTL8389M
- MAX1490BCPG
- GRM1556T1H620GD01D
- MAX8743ETX
- AD5554BRSZ
- GD75188D/SN75188DR
- UPD63645GM-GAA-A
- LT6012CS#PBF
- CGA2B2NP01H330J050BA
- ATSAM4CP16B-AHU-Y
- ADC10462CIWMX
- AD7547LP
- AD9788BSVZ
- PSMN4R8-100BSEJ
- S71GL032A40BFWOF
- TMK212AB7225KD-TR
- THS4131CDR
- GRM0225C1E4R0WDAEL
- PIC17C752-16I/L
- TPSD157M010H0100
- TLE62543GXUMA1
- CY8C4246AXI-M445
- T491C476M016AT41537280
- T495D476M025ATE100
- T491A684M020AT4280
- PAM8904JPR
- DS2502P-E48
- MAX3890ECB
- SC26C92A1B
- BU6792GS
- HY27UT088G5M-TPCB
- MT8293AE-AESL
- STC8A8K64D4-45I-LQFP64

